Als automatisiertes System ist ein Parksystem sicherheitskritisch und weniger komplex bei hohen Ge- schwindigkeiten auf der Autobahn oder in Stauszenarien. Seine Präzision bei der Positionierung des EgoFahrzeugs und der Orientierung in Abhängigkeit vom Parkplatz und benachbarten abgestellten Fahrzeugen stellt jedoch angesichts der Verwendung kostengünstiger Sensoreinrichtungen für die Erfassung und Lagebewertung eine große Herausforderung dar. Die Automatisierung des Parksystems umfasst die Präzision beim freihändigen Einparksystem und Ausparkmanöver des vorübergehend abgestellten Fahrzeugs und ruft auf Befehl des Fahrers über HMI, Tablet oder externe Schnittstellen ein freihändiges Ausparkmanöver des vorü- bergehend geparkten Fahrzeugs auf.
Konzeptdetails
Das Einpark- und Ausparksystem umfasst Sensorik und Erfassung, Modusund Statusverwaltung, Planung und Fahrzeugbewegungssteuerung. Bei den meisten bestehenden Lösungen für Einparkysteme konzentrieren sich die Forscher auf die Komplexität der Wegplanungsgeometrie oder die Entwicklung eines präzisen Steuerungssystems für ein Parkassistenzsystem. Allerdings schaffen sie damit in den meisten Fällen eine Lücke auf Systemebene zwischen der Umwandlung des Datenflusses und der Erfassung des Betätigungssystems bei der Unterstützung erfolgreicher konventioneller Parkmanöver. Der vorliegende Artikel erörtert eine ganzheitliche Parkassistenzlösung zum Manövrieren des Fahrzeugs auf einem Parkplatz. Die räumlichen Beschränkungen des Parkplatzes erfordern oft ein Parksystem mit Mehrfachbetätigung, was die Komplexität der Wegplanung und Entscheidungskontrolle weiter erhöht. Der kombinierte Bewegungssteuerungsmechanismus aus Quer- und Längshilfen unterstützt beim Parkmanöver und bietet einen Vorteil gegenüber dem herkömmlichen Ansatz, das Fahrzeug mit konstanter Geschwindigkeit zu lenken.
Das Entwicklungskonzept des Parkassistenzsystems umfasst:
- Systemtechnik
- Anforderungsabweichung des Parkassistenzsystems
- Aufstellung einer Leistungskennzahldefinition für die Leistungsbewertung
Auf diese Schritte folgen Bauteilgestaltung, Modellentwicklung und Systemva lidierung. Die Architektur eines Einparkund Ausparksystems bestimmt grundsätzlich die Systemebenenabläufe des autonomen Fahrsystems. Konzept und Auslegung sind weitere Beiträge der Systemarchitektur auf Komponentenebene zur Unterstützung der Entwicklung und Modellimplementierung. Das entwickelte System wurde einer Prototypenevaluierung auf Simulationsebene unterzogen, mit Standard-Fahrzeugdynamik in der Schleife zur Sicherstellung der Robustheit und Leistung eines integrierten Ein- und Ausparkfeatures.
Architektur des Parkassistenzsystems
Das automatische Park-Feature nutzt oft den Mechanismus zur Feststellung der Verfügbarkeit von parallel und in Querrichtung liegendem Parkraum unter Verwendung kostengünstiger Sensoreinrichtungen, wie Ultraschall oder Kamerasensoren zur Positionierung des Hostfahrzeugs in der Parklücke mit Orientierung an benachbarten geparkten Fahrzeugen. Die Architektur auf der Systemebene des Ein- und Ausparksystems ist in Bild 1 dargestellt.
Die wesentlichen Attribute des Stands der Technik haben sich entweder auf die Komplexitäten der Wegplanung oder die Fahrzeugbewegungssteuerung für Parkmanöver konzentriert, wobei jedoch die End-to-End-Lösung eines Parkassistenzsystems mit Ausparkfunktion nicht berücksichtigt wird. Die umfassende Architektur eines integrierten Einparkens in Längs- und Querrichtung wird hiermit als Stand der Technik präsentiert und beinhaltet die ursprüngliche Vorwärtsbewegung zur Ausrichtung des Host-Fahrzeugs für das Einparkmanöver nach erfolgreicher Ermittlung des freien Platzes, gefolgt von einem Rücksetzmanöver zur Positionierung des Fahrzeugs in der ermittelten Parklücke. Darüber hinaus ist das Einpark-Feature mit der Ausparkfunktion verbunden. Der Benutzer kann das Ausparkmanöver nur über Tablet oder HMI einleiten, wenn eine voreingestellte Zeit nach dem erfolgreichen Einparken vergangen ist.
Logische Komponenten und Auslegung des Parkassistenzsystems
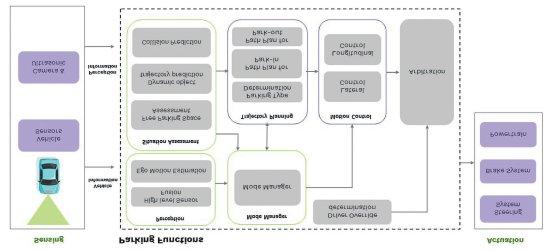
Die Systemarchitekturentwicklung bleibt eine integrale Aktivität im Entwicklungslebenszyklus und liefert einen systematischen Ansatz für eine automatisierte Feature-Entwicklung. Der Ein- und Ausparkassistent umfasst folgende Hauptfunktionen: Erfassung und Objektfusion, Situationsbewertung, Modusmanagement, Bahnplanung und Bewegungssteuerung an der Seite und in Längsrich tung. Die vorgeschlagene logische Architektur, die im Enterprise-ArchitectTool entworfen wurde (Bild 2), übertrifft das konventionelle modulare Konzept auf Software-Komponentenebene während der Design-Phase und erleichtert gleichzeitig den sequentiellen Datenfluss von den Eingangserfassungsmodulen zum Ausgabesystem.
Die Erfassungsfunktion hilft bei der Einschätzung der Eigenbewegung und zusammengeführten Verkehrsattributen auf der Grundlage von Informationen der Kamera und der Ultraschallsensoren, während das Situationsbewertungsmodul die Ermittlung freier Stellplätze, die Bewertung von Fahrzeugen oder Fußgängern im dynamischen Verkehr und die Kollisionsvorhersage durchführt. Das Modul zur Bewertung freien Parkraums wertet dann die dynamische Bedrohungslage und die Einparkmöglichkeit aus, die in einem weiteren Zusammenhang mit der Bahnplanung und der Bewegungssteuerung für das Einparkmanöver steht. Die Bahnplanungsfunktion hilft bei der Erstellung des optimalen kollisionsfreien Weges für einzelne oder mehrfache Manöver auf der Grundlage der räumlichen Beschränkungen. Darüber hinaus gewährleistet die Bewegungssteuerung die Fahrzeugnavigation auf der vorgesehenen Parkbahn mit minimalen Positionierfehlern. Der Modusmanager steuert den Übergang zwischen den definierten automatischen Parkmodi und hilft des Weiteren bei der Bestimmung der Operationen von Funktionsmodulen bei Änderungen. Der Erfassungs- und Situationsbewertungsblock beobachtet und bewertet den erforderlichen Parkraum: die Bahnplanung zum Ein- und Ausparken und die Bewegungssteuerung bleiben bei erfolgreicher Bestimmung des erforderlichen Parkraums für das automatische Einparken oder einen kollisionsfreien Weg aktiviert, um den assistierten Ausparkvorgang zu initiieren.
Entwicklungsansatz des Ein- und Ausparkassistenzsystems
Die automatische Vorwärtsbewegung des Fahrzeugs, gefolgt von einem Rücksetzmanöver während der Nachverfolgung der geplanten Bahn vom Parkplatzgang zum Stellplatz basierend auf der Initiierung des automatischen Parkassistenten durch den Benutzer bleibt ein vorrangiger Bestandteil dieses Features. Zu dieser Feature-Entwicklung gehören Erfassungs- und Sensorfusion, Modusmanagement und Entscheidungssteuerung zur gleichzeitigen Lenkung sowohl der Längs- als auch der seitlichen Bewegungen des Hostfahrzeugs in einem assistierten Modus. Die Architektur des Parkassistenzsystems wird über einen modellbasierten Entwicklungsansatz in ein Feature-Modell übertragen. Die Modularität hat für ein entsprechendes Maß an Flexibilität bei der Auslegung und Anpassung für verschiedene Varianten von Betriebsattributen und Erfassungstopologien gesorgt. Die vorherrschenden Attribute des Feature-Entwicklungsprozesses bei der Bereitstellung einer Endto-End-Lösung für Anwendungsszenarien des assistierten Parkens sind folgende:
- Entwicklung der logischen Architektur, Ableitung der Anforderungen auf System- und Komponentenebene für ein Parkassistenzsystem aus der Benutzerspezifikation sowie kritischen Szenarien, wie in Bild 3 dargestellt
- Konzept-Design und Modellentwicklung des Park-Features im Zusammenhang mit dem Manövrieren im Vorwärts- und Rückwärtsgang
- Feature-Auswertung nach Automobilstandards und Funktionsanforderungen
Der Steuermechanismus für die Lenkungsbetätigung basiert auf dem Konzept der zusammengesetzten Nachführeinheit, bei dem die Längsbewegungssteuerung die Querbewegungsverfolgungsfunktion unterstützt. Längs- und Seitenbewegung sind gekoppelt und bleiben ein kritisches Element für das Parksystem. Das ermöglicht die präzise Verfolgung einer geplanten Bahn bei einem Rücksetzmanöver im Einparksystem und hilft so bei der genauen Positionierung des Host-Fahrzeugs im Parkraum mit Ausrichtung an benachbarten geparkten Fahrzeugen. Das Konzept der zusammengesetzten Bewegungssteuerung erfordert eine zeitbasierte Nachverfolgung von Wegpunkten auf der Bahn und trägt den Einschränkungen der Systemdynamik beim Parkvorgang Rechnung. Die Leistungskennzahlen einer automatischen Einparkfunktion werden oft anhand eines dynamischen Standardfahrzeugmodells in einer Schleife validiert, um die Robustheit des Systems sicherzustellen. Die Modularität der Architektur bietet die Möglichkeit, die Komponenten der geplanten Bahn für das Rückwärtseinparken einzusetzen, um ein kollisionsfreies Ausparken mit Vorwärtsbewegung zu unterstützen, sofern die Umgebung unverändert bleibt und Bewegungen benachbarter Objekte die Route des Ausparkmanövers nicht beeinflussen. Situationsbewertung, Modusmanager und Übersteuerungsbestimmung des Fahrers bleiben auf ähnliche Weise sowohl für den Einpark- als auch für den Ausparkvorgang funktionsfähig. Das verschafft einen Vorteil gegenüber dem konventionellen Ansatz.
KPIT Technologies GmbH
Frankfurter Ring 105b
80807 München
Telefon: +49 (89) 3229966-0
Telefax: +49 (89) 3229966-99
http://www.kpit.com
Head of Marketing Germany
Telefon: +49 (89) 3229966-140
Fax: +49 (89) 3229966-999
E-Mail: stefanie.koehler@kpit.com
![]()